| Sensoren i kameraet er en chip, som er lysfølsom. Generelt er alle halvledere lysfølsomme (fx også computerchips, transistorer og dioder), men i normale kredsløb indkapsler man i en lystæt indpakning. I kamerasensoren lader man den ene side være åben, så lyset kan få adgang til mikro-transistorerne i chippen. På denne måde laver man en matrix af halvledere, som kan opfange lyset (fotoner) og omdanne lyset energi til en elektrisk spænding. | ||
| Der findes to forskellige former for sensorer; ‘Charged Coupled Device’ – CCD og CMOS sensor. CCD virker ved, at der opbygges en ladning i de enkelte celler. Når sensoren er blevet ‘eksponeret’ skiftes disse ladninger ud i et filter-, forstærker- og analog til digital konverteringskredsløb. Generelt er CCD kredsløb mere lysfølsomme end CMOS kredsløb men langsommere. CMOS kredsløb virker ved, at der til hver pixel er et lysfølsomt område, et filterkredsløb, et forstærkerkredsløb og et analog til digital kredsløb. Man kan ved denne teknologi anvende samme fabrikationsmetode som man bruger til andre elektroniske chips. Derfor bliver CMOS kredsløbene billigere at fremstille og hurtigere end CCD. Men denne metode betyder, at det lysfølsomme areal bliver mindre og sensoren derfor er mindre lysfølsom end CCD sensoren. Det mindre areal betyder også at opløsningen bliver mindre, idet arealet optaget af det ikke lysfølsomme kredsløb vil skabe ‘huller’ overfladen, hvor lyset ikke bliver målt. Man er derfor begyndt at inkludere en mikrolinse foran hvert lysfølsomme element, så lyset der rammer pixeloverfladen bliver fokuseret på det lysfølsomme lag. CCD bliver i dag mest brugt til ‘high-end’ film- og videokameraer, fx hos TV selskaberne og i filmindustrien. CMOS bliver mest brugt i kameraer til fotografering (pga. de lave omkostninger). | |||
| Sensoren kan beskrives som en samling af spande, hvor hver spand er en enkelt pixel i sensoren. Disse spande ‘opsamler’ lyset mens lukkeren er åben. Hver spand indeholder forskellige kredsløb, fx støjfilter, forstærker, og analog til digital konverter (i CMOS sensoren). Den tekniske betegnelse for spandende er cavities (hulrum) eller wells (brønde). |  | ||
  | Jo flere fotoner, der opsamles i de enkelte spande, jo mere lys er der i det areal som spanden er i. Antallet af fotoner (mængden af lys) kan måles og bliver af analog til digital konverteren omsat til et tal. Fx sort (ingen fontoner) = 0,0000 Volt = 0 eller hvid (spanden er fyldt) = 5,0000 Volt = 255 Tallet er angivet i binær form. Det er computernes interne talsystem med 0’ere eller 1’ere kombineret så de angiver et tal, Fx 00000111 = 7, 00000000 = 0, 11111111 = 255 8 bit som ovenover svarer til det man kalder 1 byte. | ||
Man kan sige, at hver enkelt lille pixel er som en spand vand, der fyldes op afhængig af
Hvor fyldt ‘spanden’ er kaldes niveau eller ‘level’ på engelsk. | 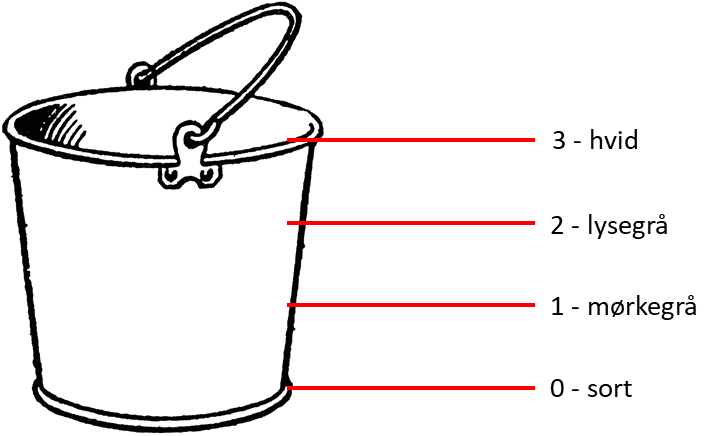 | ||
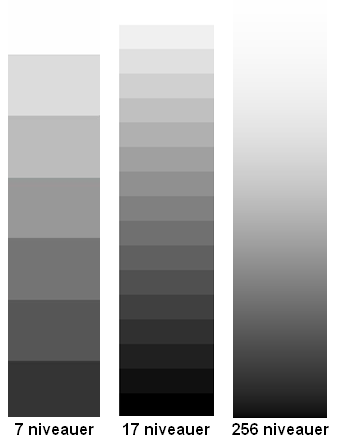 | Når spændingen, som fortæller hvor meget lys der er i ‘spanden’ skal omformes til et tal sker det ved hjælp af et kredsløb (analog til digital konverter). Konverteringen sker til et binært tal, som vores computere forstår; altså tallet er en kombination af 0 og 1 – såkaldte bits. 3 bits: 8 mulige niveauer I dag bruges der mindst 8 bits konvertere, for det meste er det 10 eller 12 bits konvertere. Dyrere kameraer kan ofte gå op til 14 eller 16 bits. | ||
| Jo højere bitnummer, jo flere niveauer og deraf følgende bedre opløsning mht. lysmængden. Men det er på bekostning af lagerplads. Et billede på 24 megapixels vil fylde omkring 24 megabytes (ikke komprimeret) ved en 8 bits opløsning. Ved 16 bits opløsning vil det samme billede fylde cirka 48 megabytes. | |||
|  | ||
 |
| ||
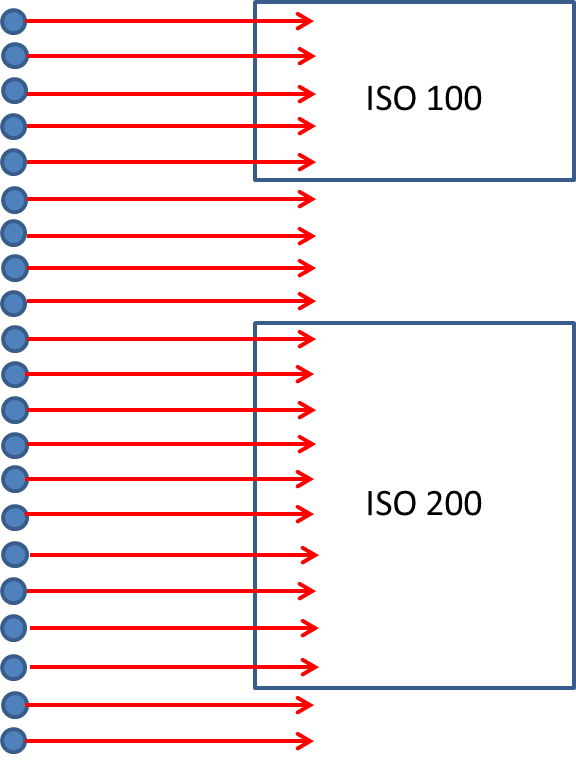
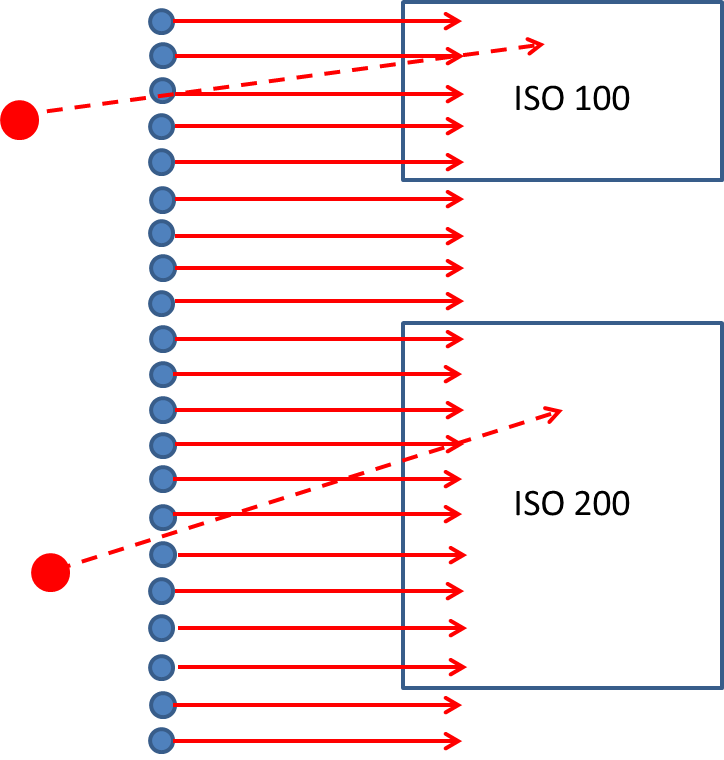
Støj kan ses som –
Hvis man bruger det laveste ISO-tal, fx ISO 200, man har i kameraet (ikke LO, -0.3EV el. lign.) vil man få den bedste billedkvalitet. |  | ||
| Generelt er det arealet af de enkelte sensorelementer, der er afgørende for ‘kvaliteten’. Det medfører, at selve sensorstørrelsen også har en afgørende indflydelse på billedkvaliteten. Mange megapixels er langt fra afgørende for billedkvaliteten. Nedenstående fotos er taget med et professionelt kamera (Nikon D300s) med en APS-C sensor (halvformat) og et smartphone kamera (Huawei P8). Begge har en sensor på 13 megapixels, men størrelsen på sensoren, og dermed arealet på de enkelte sensorelementer, er forskellig. Nikon D300s har en sensor med dimensionerne 23,6 x 15,8 mm, mens Huawei P8s sensor er 4,8 x 3,6 mm. Begge billedserier er optaget ved ISO 1600 med samme lysforhold. Afstanden til motivet er justeret, så det fylder omtrent lige meget på de to billeder. Der er ikke brugt digital zoom på P8. | |||
| Nikon D300s
| Huawei P8
| ||
Billede forstørret ca. 300%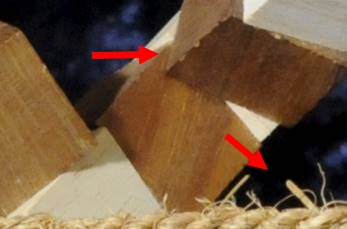 | Billede forstørret ca. 300%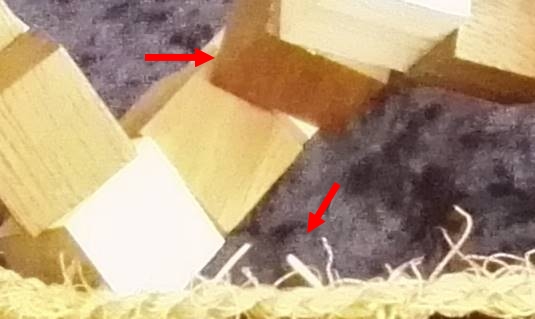 | ||
| Bemærk at der er væsentlig forskel i farverne, specielt når man tænker på, at begge billeder er optaget under samme lyskilde. Bemærk også, at på den store sensor kan man tydeligt se små hak i træet (røde pile), mens det knap kan anes på den lille sensor. Bemærk også, at der er en ‘halo’ omkring fibrene på den lille sensor (røde pile). Dette vil se ud som uskarphed. På grund af de små dimensioner i smartphones kamerasystem, vil selv små fejl i linser eller små fejl i justering af objektivelementerne have en markant indflydelse på billedkvaliteten i forhold til et kamera med en større sensor. Men antallet af pixels har indflydelse på opløsningen af billedet. Få pixels betyder et mere grovkornet billede.
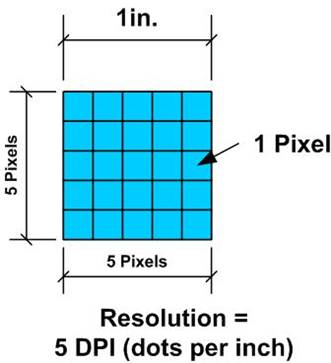
Som man kan se, bliver det nemmere at se hvad billedet forestiller med stigende antal pixels, billedet bliver altså skarpere. Få pixels betyder også, at mindre detaljer i billedet kan forsvinde fordi de er for små til at blive opfattet af sensorens pixels (fx øjnene på modellen). Opløsningen kan måles på forskellig måde, som regel angivet som pixel per længeenhed eller per arealenhed. Den mest anvendte måle metode har vi ‘arvet’ fra trykkekunsten – dots per inch (prikker per tomme) forkortet DPI.
| |||
| Hvis vi nu beholder antaller af prikker, men forøger siderne til 2 tommer – så bliver opløsningen 2½ DPI – vi har stadig 5 prikker, men nu er siderne 2 tommer, så 5 / 2 = 2½ Dette er hvad der sker, når vi forstørrer vores billeder, opløsningen falder jo mere vi forstørrer billederne. | |||
| Som man nok har bemærket, har vi ind til nu kun snakket om at sensoren måler mængden af lys i de enkelte pixels, men ikke hvordan vi skaber farverne. Hvis vi ikke gjorde noget, ville billederne der kommer ud af sensoren være i gråtoner. Man kan sige, at sensoren er farveblind. | |||
| I filmens dage anvendte man et princip om at optage billederne i tre grundfarver; rød, grøn og blå. De tre lag i en farvefilm er hver følsom for enten rød, grøn eller blå. Når disse tre lag blev kombineret ved gennemlysning (dias), opnåede vi et farvebillede. | 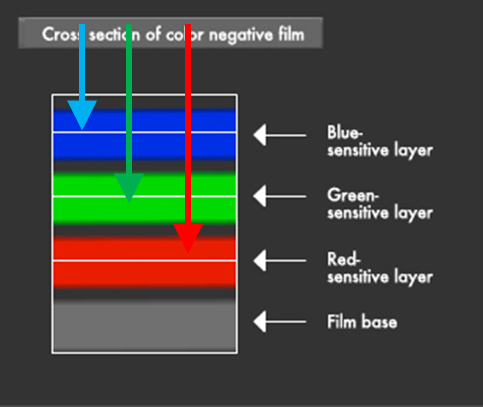 | ||
| I dag bruger man næsten samme princip til at skabe farver. Lyset der kommer til sensoren splittes op i de tre grundfarver rød, grøn og blå ved hjælp af filtre. | 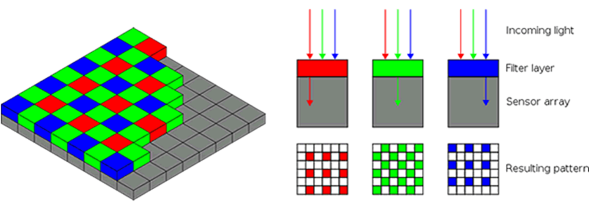 | ||
| Man sætter et farvet filter (rød, grøn eller blå) foran hver pixel i et bestemt mønster. Så et pixel bliver rødfølsomt, et andet bliver blåfølsomt og to tilstødende bliver grønfølsomme. Grunden til man bruger to grønne filtre er dels for symmetrien, dels fordi vores øjne er mest følsomme for farvenuancer i det grønne område og endelig kan man anvende de to grønne til at bestemme hvidpunktet og hvidbalancen. Dette filtersystem kaldes for et Bayer filter og findes i de fleste kameraer i dag (mere end 90%). en af ulemperne er, at man de facto nedsætter sensorens opløsning med en faktor fire, idet man skal bruge 4 pixels til at danne ét farvepixel. | |||
| Der eksisterer en anden type sensor, hvor man tilnærmer sig princippet fra de gamle farvefilm. Sensorelementerne ligger i tre lag, et rødfølsomt lag, et grønfølsomt lag og et blåfølsomt lag. | 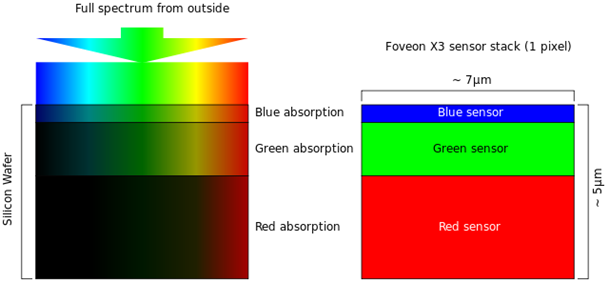 | ||
| Fordelen er, at man bibeholder sensorens opløsning. Ulempen er, at denne sensortype er meget mere støjende end Bayer filter sensoren. En anden ‘ulempe’ er, at Sigma ejer patentet på denne type sensor og er meget lidt villig til at lade konkurenterne benytte sig af denne sensortype. Denne sensortype kaldes en Foveon sensor. Den har en markant højere opløsning end Bayer filter sensoren, men er som nævnt mere støjende. Når man får udviklet et kredsløb, der kan forbedre signal/støj forholdet væsentligt, vil denne type sensor nok være vejen frem til højere opløsning på sensorerne, da man i dag er nået til grænsen for det mulige i Bayer filter sensoren. | |||